|
|
|
|
Random sampling: new insights into the reconstruction of coarsely-sampled wavefields |
| (2) |
|
|---|
|
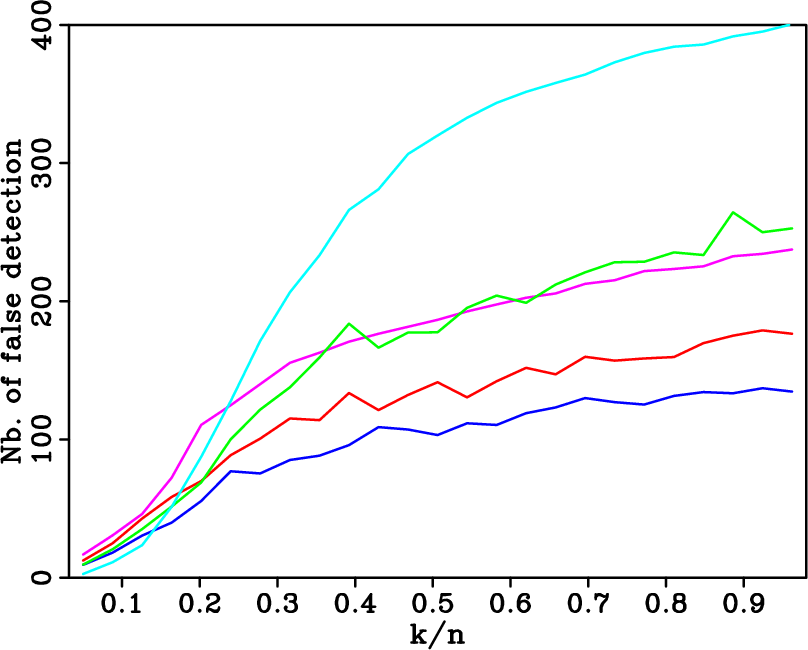
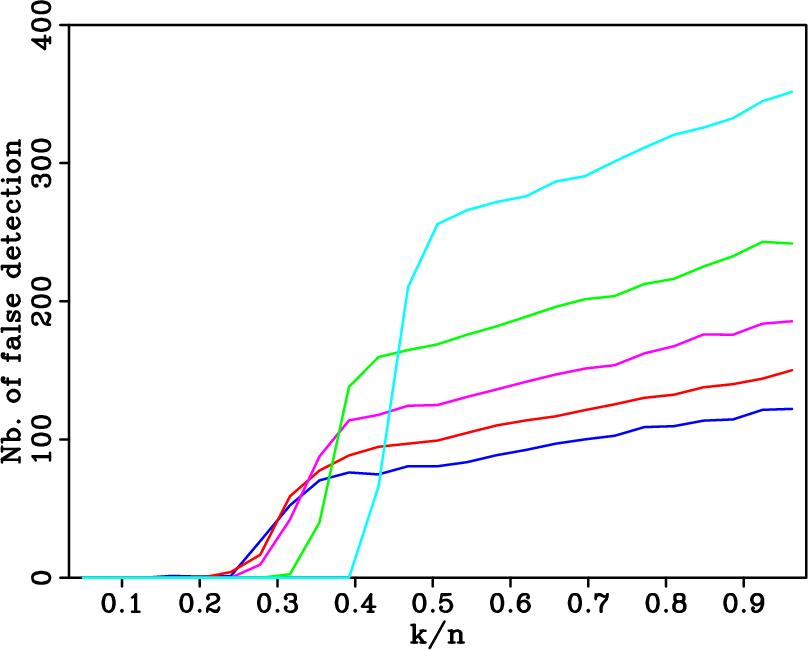
phasediagREG,phasediagIRREG
Figure 2. Average recovery curves from sub-Nyquist rate samplings using nonlinear sparsity-promoting optimization. Average recovery curves (a) from regular sub-samplings by |
|
|
|
|
|
|
Random sampling: new insights into the reconstruction of coarsely-sampled wavefields |