Contents
% Time domain excample of constrained FWI % Author: Mathias Louboutin using Bas Peters framework % Seismic Laboratory for Imaging and Modeling % Department of Earth, Ocean, and Atmosperic Sciences % The University of British Columbia % % Lat update: January 2016 % You may use this code only under the conditions and terms of the % license contained in the file LICENSE provided with this source % code. If you do not agree to these terms you may not use this % software. % If you have any questions, errors or disappointing results, email % (mloubout {at} eos.ubc.ca) close all clear all clc
startup
startup current_dir = pwd; addpath([current_dir,'/../mbin']); cd ../results
Define general options for constraints, same as frequency domain
[constraint,options]=Default_constraints_setup(); % The following lines are the options set inside Default_constraints_setup % You can modify it or leave it commented and us the default options %Dykstra options % constraint.options_dyk.maxIt=20; % constraint.options_dyk.minIt=3; % constraint.options_dyk.evol_rel_tol=1e-5; % constraint.options_dyk.tol=1e-2; % constraint.options_dyk.feas_tol=1e-1; % constraint.options_dyk.log_feas_error=0; % constraint.options_dyk.log_vec=0; % % constraint.ADMM_options.maxit=800; % constraint.ADMM_options.evol_rel_tol=1e-6; % constraint.ADMM_options.rho=1e2; % constraint.ADMM_options.adjust_rho=1; % constraint.ADMM_options.test_feasibility=0; % constraint.ADMM_options.feas_tol=1e-2; % % % optimization options % % options.maxIter = 20; % options.memory = 1; % options.testOpt = 0; % options.verbose = 3; % options.interp=0; % % % % bound constraints % constraint.v_max = vpmax; %upper bound % constraint.v_min = vpmin; %lower bound % constraint.v_max_plus = 1.5; %upper bound is current highest velocity + params.v_max_plus % constraint.v_min_minus = .05; %lower bound is current lowest velocity - params.v_min_minus % % % %Total Variation % constraint.TV_initial = 4; % constraint.TV_increment = 2; % constraint.TV_proj = 'admm'; % constraint.TV_units = 's^2/km^2';%'s^2/m^2'; % minimum smoothness full none aspect % constraint.smoothpars = [4, 5, 3];%(0.8)
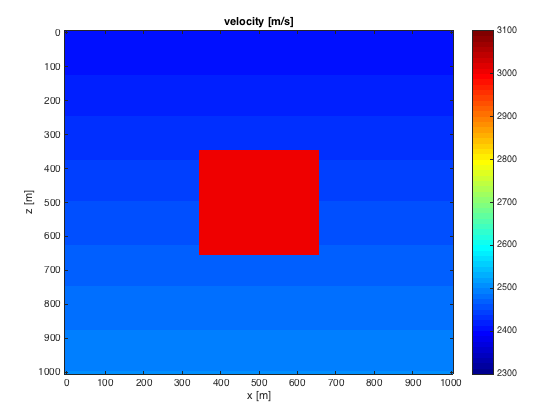
define velocity model
% grid z = 0:10:1000; x = 0:10:1000; [o,d,n] = grid2odn(z,x); [zz,xx] = ndgrid(z,x); % background velocity 2500 [m/s] v0 = linspace(2400,2500,length(z))'*ones(1,length(x)); % circular perturbation with radius 250 m and strenth 10\% %dv = 0*xx; dv((xx-500) + (zz-500) <= 250) = .2*2500; v = v0; center_x = round(length(x)/2); center_z = round(length(z)/2); v(center_z-15:center_z+15,center_x-15:center_x+15)=2500+.2*2500; vpmin=min(v(:))-100; vpmax=max(v(:))+100; m=1e6./(v).^2; m0=1e6./v0.^2; % plot figure;imagesc(x,z,v,[vpmin vpmax]);xlabel('x [m]');ylabel('z [m]');title('velocity [m/s]');colorbar;colormap(jet);
transmission experiment
% grid model_t.o = [o 0]; model_t.d = [d d(1)]; model_t.n = [n 1]; model_t.space_order=4; model_t.freesurface=0; % Time axis model_t.T=1500; % 1s recording % frequencies 15 Hz Ricker wavelet. model_t.f0 = 0.015; [m,model_t,m0]=Setup_CFL(m,model_t,m0); % Ricker wavelet with peak frequency f0 and phase shift t0 q=sp_RickerWavelet(model_t.f0,1/model_t.f0,model_t.dt,model_t.T); model_t.NyqT=0:model_t.dt:model_t.T; % Data recorded at every time step % source and receiver locations model_t.zsrc = 0:100:1000; nsrc = length(model_t.zsrc); model_t.xsrc = 50*ones(size(model_t.zsrc)); model_t.ysrc = 0*ones(size(model_t.xsrc)); model_t.zrec = 0:10:1000; nrec = length(model_t.zrec); model_t.xrec = 950; model_t.yrec = 0; model_t.type='full'; % Same receiver for all sources model_t.save='RAM'; % Save forward wavefield in RAM % create data D_t = Gen_data(m,model_t,q); % inversion % create function handle for misfit fh = @(x) GS(x,model_t,q,D_t);
Choose the constraints you want
constraint.use_bounds = 1; constraint.use_min_smooth = 0; constraint.use_TV = 0;
Run the inversion
P = setup_constraintsTS(constraint,model_t,m0,1); %get projectors funProj = @(input) Dykstra_prox_parallel(input,P,constraint.options_dyk); % get projector onto the intersection [mn_t,ffinal,nfunEvals,nprojects] = minConf_PQNTS(fh,m0,funProj,options);
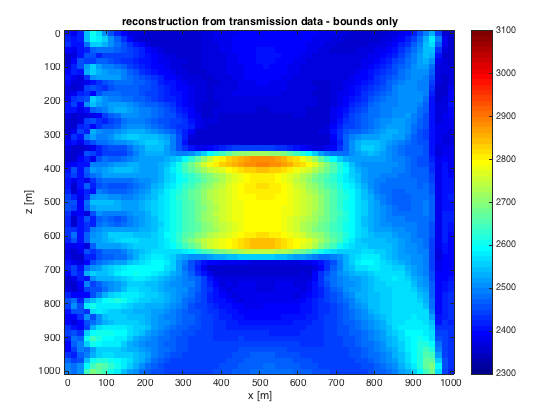
Plot the result
mn_t=reshape(1e3./sqrt(mn_t),model_t.n); figure;imagesc(x,z,mn_t,[vpmin vpmax]);xlabel('x [m]');ylabel('z [m]');title('reconstruction from transmission data - bounds only'); colorbar;colormap(jet);
Choose the constraints you want
constraint.use_bounds = 1; constraint.use_min_smooth = 0; constraint.use_TV = 1;
Run the inversion
P = setup_constraintsTS(constraint,model_t,m0,1); %get projectors funProj = @(input) Dykstra_prox_parallel(input,P,constraint.options_dyk); % get projector onto the intersection [mn_t,ffinal,nfunEvals,nprojects] = minConf_PQNTS(fh,m0,funProj,options);
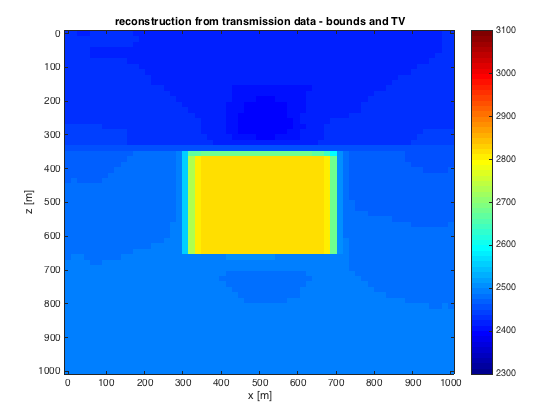
Plot the result
mn_t=reshape(1e3./sqrt(mn_t),model_t.n); figure;imagesc(x,z,mn_t,[vpmin vpmax]);xlabel('x [m]');ylabel('z [m]');title('reconstruction from transmission data - bounds and TV'); colorbar;colormap(jet);