2D modified gauss-newton full-waveform inversion
Author: Xiang Li
Seismic Laboratory for Imaging and Modeling
Department of Earch & Ocean Sciences
The University of British ColumbiaDate: 02, 2012
Contents
Camenbert example
This is an demonstration of modified gausss-newton algorithm based on Camembert model [3], please visit the script MGNFWI_camenbert.html for detail
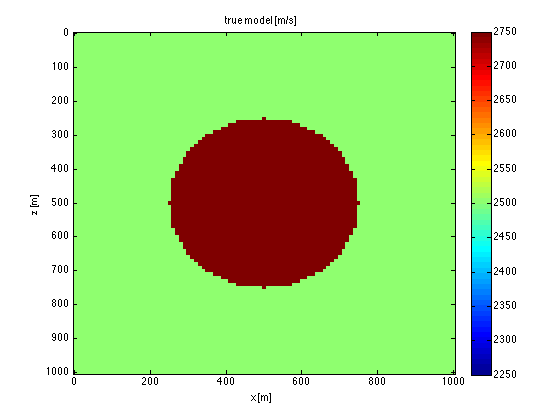
true model and initial model
z = 0:10:1000; x = 0:10:1000; [o,d,n] = grid2odn(z,x); [zz,xx] = ndgrid(z,x); m0 = 2500 + 0*xx; % circular perturbation with radius 250 m and strenth 10% dv = 0*xx; dv((xx-500).^2 + (zz-500).^2 <= 250^2) = .1*2500; m = m0 + dv; figure(1);imagesc(x,z,m);caxis([2250,2750]);xlabel('x [m]');ylabel('z [m]');title('true model [m/s]');colorbar; figure(2);imagesc(x,z,m0);caxis([2250,2750]);xlabel('x [m]');ylabel('z [m]');title('initial model [m/s]');colorbar;
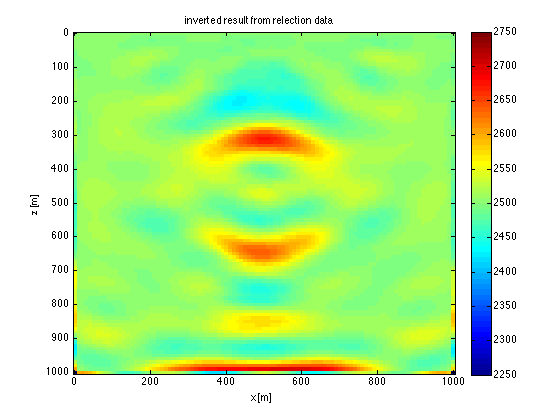
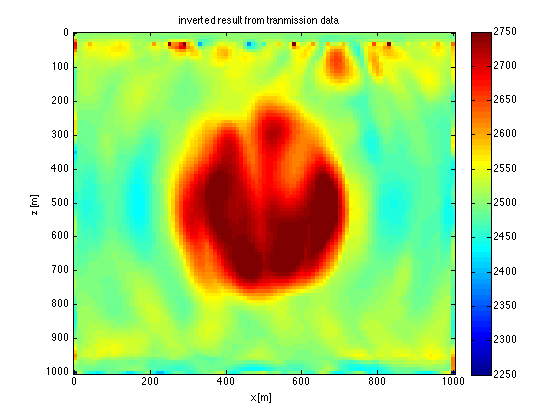
% reconstructions model % reflection example, source and receivers are on the top of the model load FWIresult_camenbert.mat figure(3);imagesc(x,z,results(:,:,end));caxis([2250,2750]);xlabel('x [m]');ylabel('z [m]');title('inverted result from relection data');colorbar; % tranmission example with source at the top and recievers at the bottom load FWIresult_camenbert_tranmission.mat figure(4);imagesc(x,z,results(:,:,end));caxis([2250,2750]);xlabel('x [m]');ylabel('z [m]');title('inverted result from tranmission data');colorbar;
BG model example
This is an demonstration of modified gausss-newton algorithm based on BG Compass model [1,2], please visit the script MGNFWI_BG.html for detail
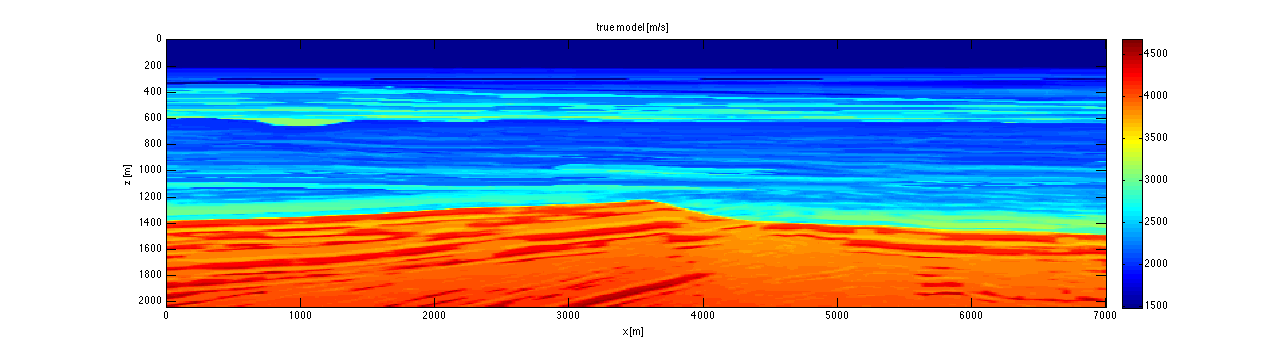
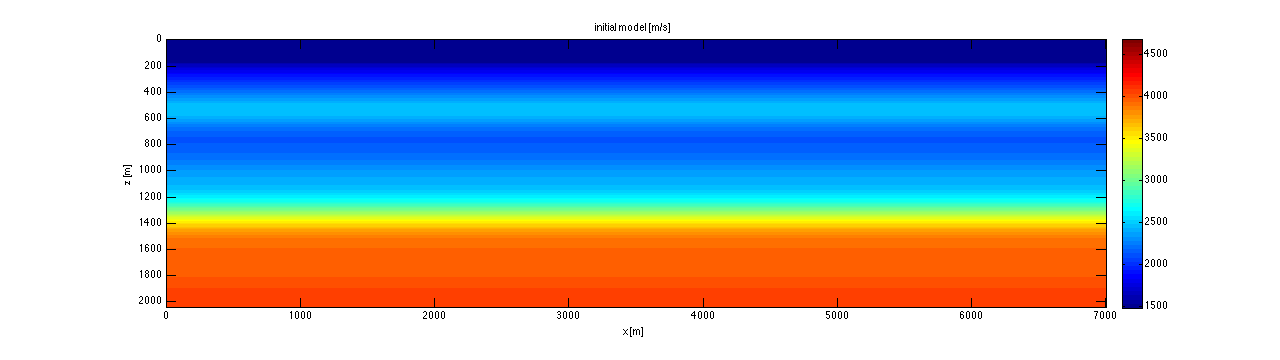
true model and initial model
load bg2dmodel.mat z = 0:10:2040; x = 0:10:7000; scrsz = get(0,'ScreenSize'); figure('Position',[1 scrsz(4)/4 scrsz(3)/2 scrsz(4)/4]);imagesc(x,z,vel);set(gca,'plotboxaspectratio',[7 2 2]);caxis([1480,4680]);xlabel('x [m]');ylabel('z [m]');title('true model [m/s]');colorbar;
scrsz = get(0,'ScreenSize'); figure('Position',[1 scrsz(4)/4 scrsz(3)/2 scrsz(4)/4]);imagesc(x,z,vel1);set(gca,'plotboxaspectratio',[7 2 2]);caxis([1480,4680]);xlabel('x [m]');ylabel('z [m]');title('initial model [m/s]');colorbar;
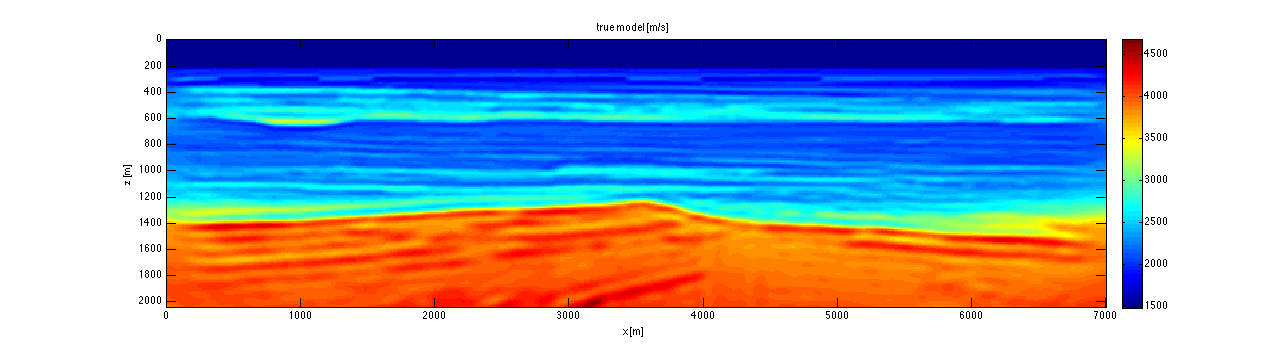
% reconstructions model with 7 simultaneous shots and 10 frequencies for each GN update load FWIresult_BG.mat scrsz = get(0,'ScreenSize'); figure('Position',[1 scrsz(4)/4 scrsz(3)/2 scrsz(4)/4]);imagesc(x,z,results(:,:,end));set(gca,'plotboxaspectratio',[7 2 2]);caxis([1480,4680]);xlabel('x [m]');ylabel('z [m]');title('true model [m/s]');colorbar;
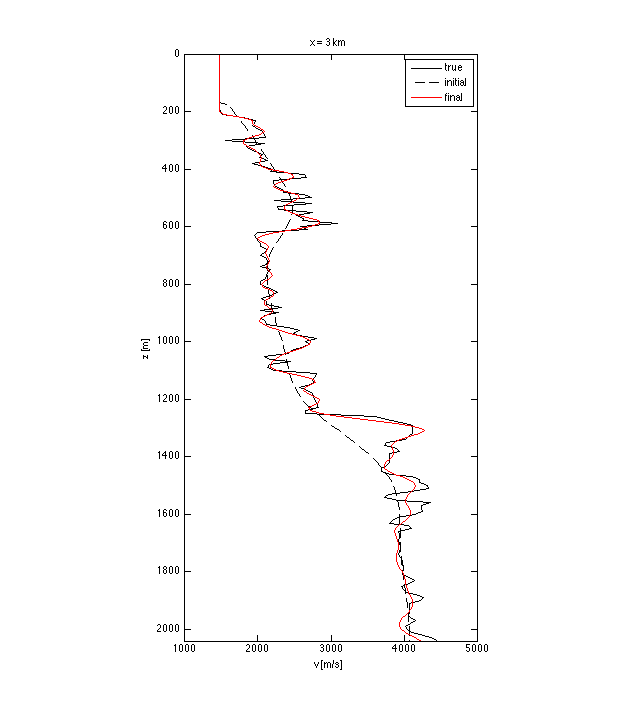
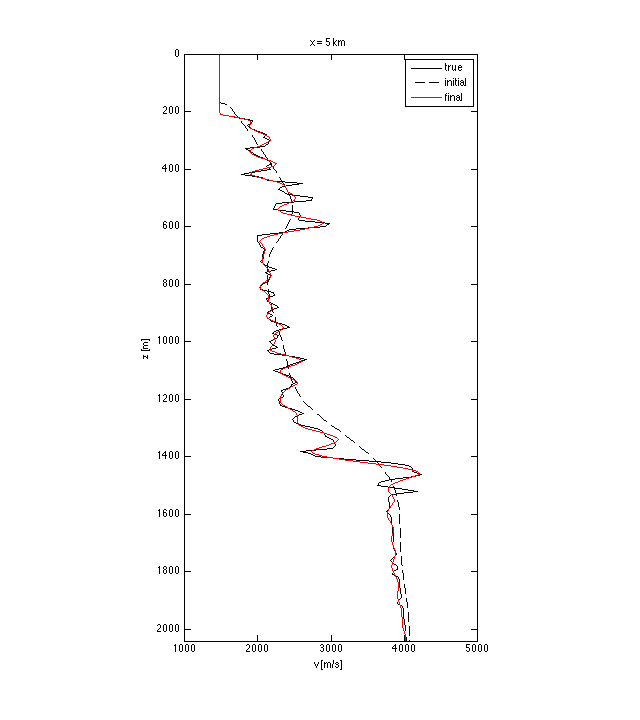
% trace to trace comparison offset = 300; figure('Position',[1 scrsz(4)/2 scrsz(3)/4 scrsz(4)/2]);plot(vel(:,offset),z,'k',vel1(:,offset),z,'k--',results(:,offset,end),z,'r');axis ij; ylim([0 z(end)]);set(gca,'plotboxaspectratio',[1 2 1]); xlabel('v [m/s]');ylabel('z [m]');title('x = 3 km');legend('true','initial','final'); offset = 500; figure('Position',[1 scrsz(4)/2 scrsz(3)/4 scrsz(4)/2]);plot(vel(:,offset),z,'k',vel1(:,offset),z,'k--',results(:,offset,end),z,'r');axis ij; ylim([0 z(end)]);set(gca,'plotboxaspectratio',[1 2 1]); xlabel('v [m/s]');ylabel('z [m]');title('x = 5 km');legend('true','initial','final');
References
[1] Felix J. Herrmann, Xiang Li, Aleksandr Y. Aravkin, and Tristan van Leeuwen, A modified, sparsity promoting, Gauss-Newton algorithm for seismic waveform inversion, in Proc. SPIE, 2011, vol. 2011.
[2] Xiang Li, Aleksandr Y. Aravkin, Tristan van Leeuwen, and Felix J. Herrmann, Fast randomized full-waveform inversion with compressive sensing. 2011. Geophysics, accepted.
[3] O. Gauthier, J. Virieux, and A. Tarantola. Two-dimensional nonlinear inversion of seismic waveforms: Numerical results. Geophysics 51, 1387-1403 (1986)
Acknowledgements
The synthetic Compass model was provided by the BG-GROUP, see also the disclaimer.